
(圖片截自:http://www.invensense.com/products/motion-tracking/6-axis/mpu-6050/)
首先我們去GitHub下載i2cdevlib

下載完之後我們將i2cdevlib-master資料夾解壓縮後放入(C:\Users\user\Documents\Arduino\libraries)的路徑內

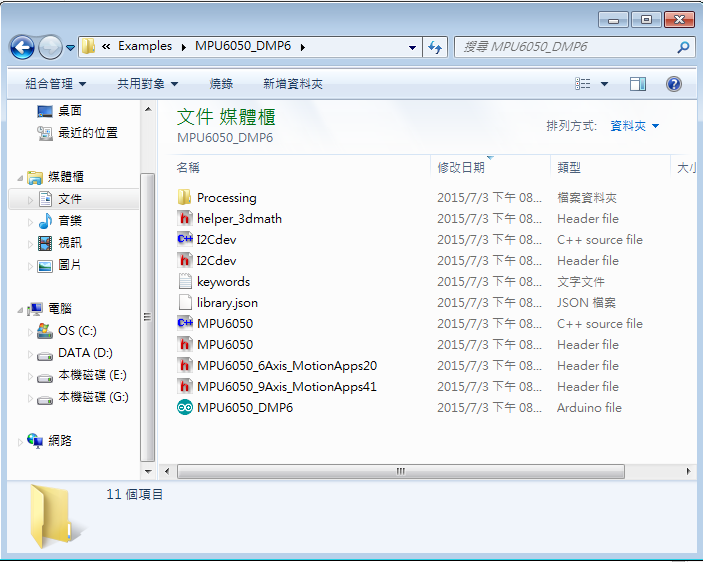
接著我們開啟i2cdevlib-master資料夾,再進入裡面的Arduino資料夾並找到I2Cdev資料夾,將I2Cdev裡面的四個檔案複製貼上到MPU6050資料夾內

再將MPU6050資料夾內除了Examples資料夾以外的檔案全部複製並在Examples內的MPU6050_DMP6資料夾內貼上
接著開啟MPU6050_DMP6,並將第117行的//define OUTPUT_TEAPOT改成define OUTPUT_TEAPOT

接著選好我們的Arduino板子及COM Port就可以編譯上傳囉~
上傳完之後我們就可以開始拿出MPU6050
Arduino與MPU6050的接法為:
VCC <---> 3.3V
GND <---> GND
SDA <---> A4
SCL <---> A5
INT <---> D2
連接完我們打開Arduino IDE右上角的Serial Monitor,將Baud Rate設成115200

接著在上方文字框內隨意輸入任何文字(例如ArkLab)並按Send

如果有開始跑出數值的話就代表我們已經成功一半囉!
有了DMP的協助,現在MPU6050已經直接跑出YAW,PITCH,ROW的值了~
可是單單只有數字不過癮,我們當然要著手讓它圖像化,這時候Processing就該亮麗登場!
我們先下載最新版Processing以及需要的library--toxiclibs
同樣的我們安裝好Processing之後將toxiclibs-complete-0020資料夾解壓縮放到C:\Users\user\Documents\Processing\libraries資料夾內

接著我們就回到剛剛MPU6050_DMP6的資料夾內,發現上面居然有個Processing資料夾,讓我們開啟MPUTeapot.pde

按下左上角長得像播放鍵的Run

飛機的姿態就出來了!
趕快動一動手中的MPU6050模組,就會發現小飛機隨著手的姿態一起轉動囉~


延伸閱讀:
1.MPU6050 Datasheet: http://www.seeedstudio.com/wiki/images/b/b1/MPU6050.pdf
P.S.
我們的FB社團"Drone Maker-飛行器自造工坊"也時常會有各種學術討論
歡迎大家一起加入討論學習喔!
請問它的gyro值會不會有偏差,偏差值該怎麼消除?轉的時候值是否會不準確?
回覆刪除比如我想讓他轉90度會不會每次少轉一兩度,結果轉個幾次誤差越來越大?
謝謝!
作者已經移除這則留言。
回覆刪除要註釋Arduiuno裡的//#define OUTPUT_READABLE_YAWPITCHROLL,Processing裡的String portName = "COM5";換去自己連接Arduino的port 最重要的兩個樓主沒解釋...
回覆刪除請問我按 RUN 鍵後出現
回覆刪除the package "toxi" does not exist,you might be missing a libary
No library found for toxi.geom
No library found for toxi.processing
Libraries must be installed in a folder named 'libraries' inside the 'sketchbook' folder.
是我解壓縮少了什麼嗎
請問一下D2 是否一定要接?
回覆刪除我在沒接的狀況下也是可以動作...?
請問一下D2 是否一定要接?
回覆刪除我在沒接的狀況下也是可以動作...?
作者已經移除這則留言。
回覆刪除