首先呢,我們先將馬達分別裝置在四隻軸上

接著將電子變速器(簡稱電變或電調),銲接在配電盤上,而因為我們使用的馬達為無刷馬達,大部分航模上用的無刷馬達,都是外轉式無刷馬達,而名稱由來是運作時整個外殼都會旋轉,可產生較大的扭力,因此成為主流。
電池所提供的直流電是無法驅動的,要控制給電時間,就必須要有一個控制器,而這個控制器就是電子變速器,所以我們必須裝置他,目的是為了能夠控制馬達,使直流電變成三相電,三相電就是三條間段性的電壓輸出,如此就可以使馬達順利運轉,而我們遙控模型的電變是使用PWM訊號去控制馬達轉速。
我們在這邊簡述PWM訊號,是一種利用數位訊號去模擬類比訊號的方式,但數位就是0或1,因此我們用快速的脈波調變去模擬出電壓變化,在遙控模型中,會以微處理器去讀出脈波的寬度,如此就可以控制了。



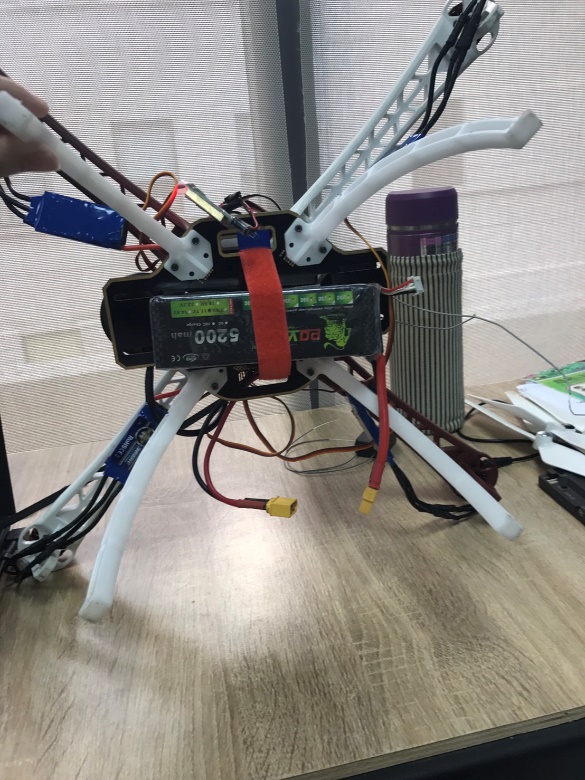
如此可以將四隻軸與基板組裝,將旋翼裝置在馬達上。






最後我們就可將配電盤以及基板組合在一起,而在這裡我們需要注意的是四個馬達的位置,他們分別的轉向。在無人機正向的左前方旋翼,必須為反槳,右前方必須為正槳,而相對應位置的旋翼,應該為一致的。而反槳正槳的分辨,就是反槳的話會是順時針轉動,正槳的話是逆時針轉動,可由旋槳上方吹氣看他轉動方向去分別
就如前面所提到的,我們可以藉由小精靈來了解他的轉向,如轉向錯誤,只要將任意兩條連接線交換,即可得到想要的轉向。

都組裝完成後,我們就可以開始校正了
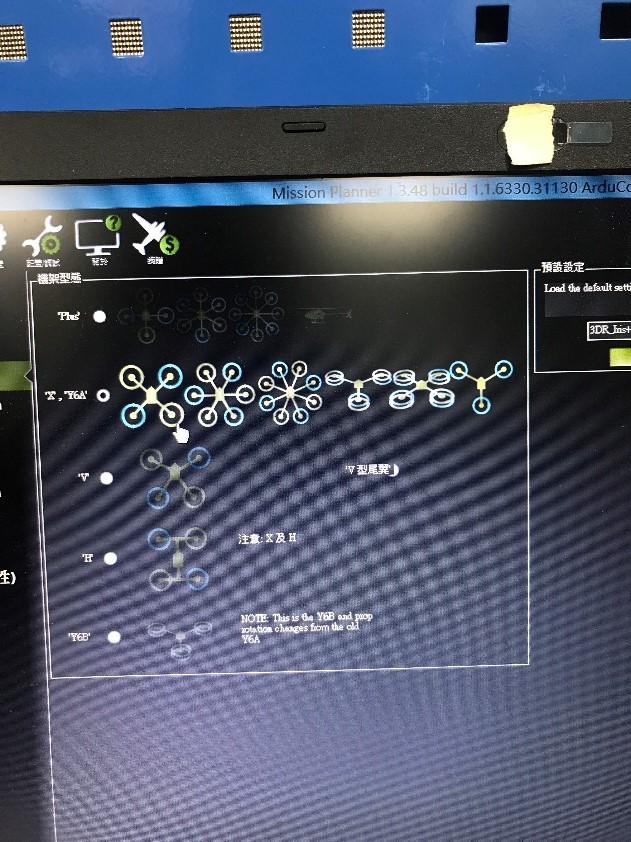
首先進入到mission planner程式操作頁面,連接飛控與mission planner,選擇機型種類,我們在這邊是選擇四軸的圖案,我們就可以燒錄四軸的飛控程式。
接著進行加速度計的校正,正面,左右上下以及背面,我們都需要按照指示作校正。


接著為羅盤的校正,必須為紅點碰觸到每個白點,旋轉過程中,會繞出如球型的圖案,完成後會出現偏移修正量,而每個數值介在-400~400間才為正常


再來為遙控器校正,先將遙控器與飛控連線,將遙控器都移動至最大極限,而紅線就會停留在遙控器之行程最大值,如此為讓飛控知道我們搖控器控制行程最大量以及最小量。

再來是電變器之校正,我們此次是使用單個電變器之校正方法,首先將電變接上接收器的油門通道,將遙控器打開並將油門推至100%,接著連接電池,馬達會開始出現校正提示音,待提示音響完後,就可將油門推至0%,完成校正,這種校正方法類似於遙控器校正,告知電變器,遙控器油門的最大與最小行程量。


Q1請問是電變的訊號線正極都不接嗎?
回覆刪除Q2請問pid用qgc要怎麼調那些參數呢?
Q3如果想要做內部程式碼的編寫要如何入門呢?
1.通常使用外接的ubec供給飛控電源比較不會有雜訊
回覆刪除2.看韌體版本可調的參數不一樣
3.可以從較小精簡的飛控程式下手 如 mwc cleanflight 等
我也都照這樣調整
回覆刪除但是要試飛的時候 油門桿不動 電機會越轉越快 為什麼呢??
請問飛控板要怎麼和接受器接(RX-601)
回覆刪除透過 PWM 或是 PPM 都可以喔
刪除